Publications
2026

Trajectory Planning for Safe Dual Control with Active Exploration
Under Review, 2026
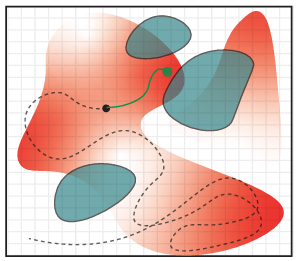
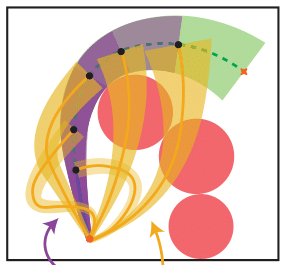
Provably Safe Stein Variational Clarity-Aware Informative Planning
2026 Learning for Dynamics and Control Conference (L4DC)
A Formal gatekeeper Framework for Safe Dual Control with Active Exploration
American Control Conference (ACC) 2026
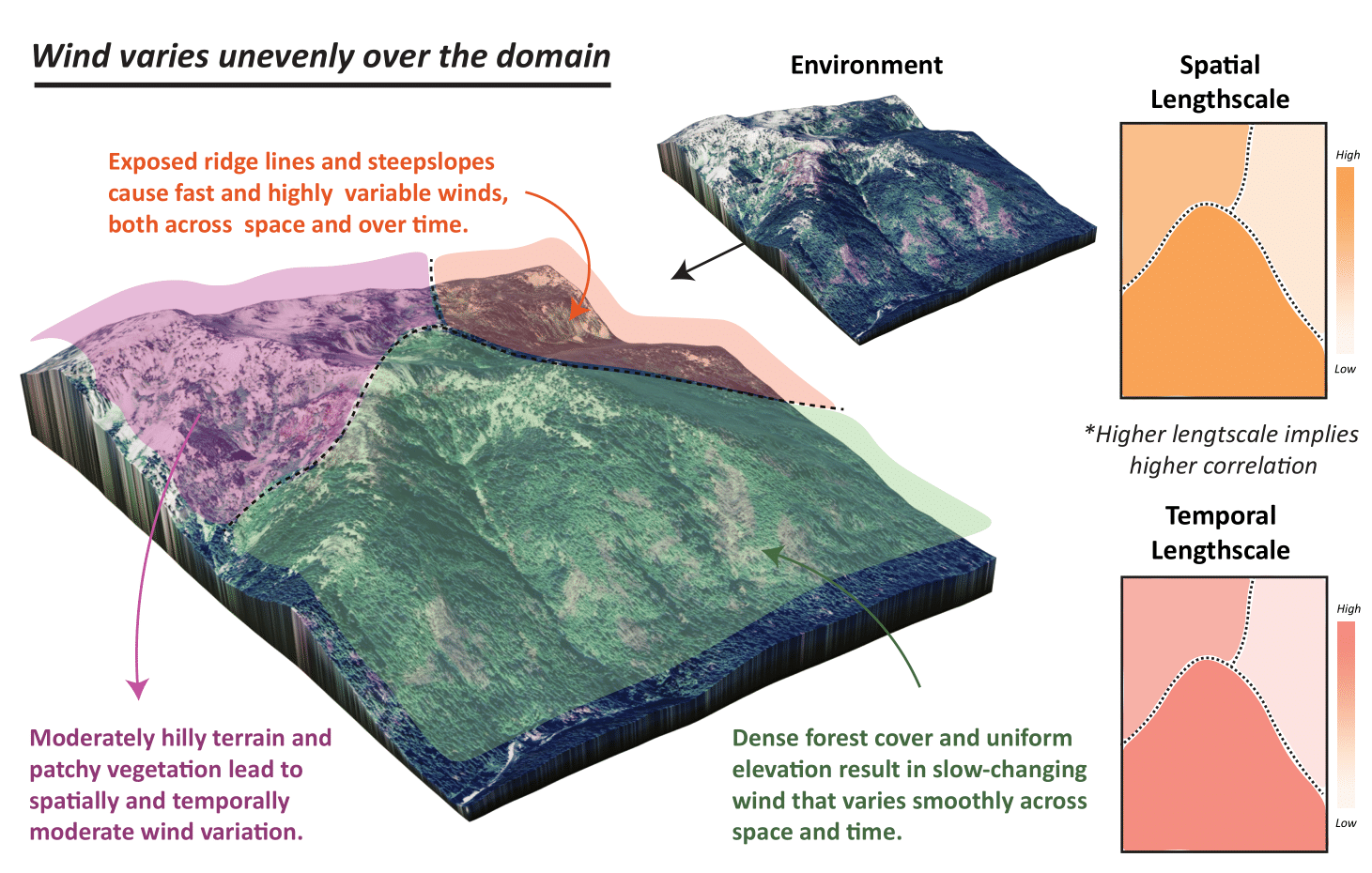
Multi-Robot Allocation for Information Gathering in Non-Uniform Spatiotemporal Environments
American Control Conference (ACC) 2026
2025

Adaptive Ergodic Search with Energy-Aware Scheduling for Persistent Multi-Robot Missions
Autonomous Robots, Springer Nature
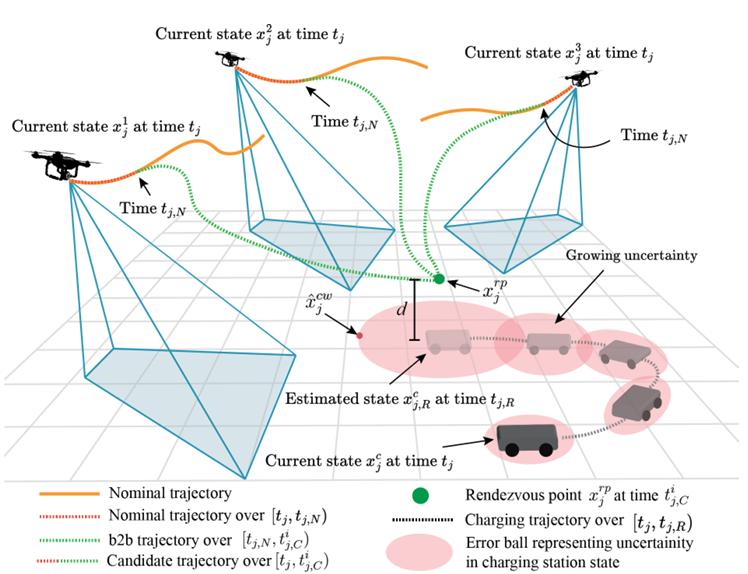
meSch: Multi-Agent Energy-Aware Scheduling for Task Persistence
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Enabling Safety for Aerial Robots: Planning and Control Architectures
ICRA 2025 Workshop on 25 Years of Aerial Robotics: Challenges and Opportunities
2024
Eclares: Energy-Aware Clarity-Driven Ergodic Search
2024 IEEE International Conference on Robotics and Automation (ICRA)
2021

Trajectory planning for autonomous vehicles using hierarchical reinforcement learning
2021 IEEE International Intelligent Transportation Systems Conference (ITSC)