Backup Policy Only
The car follows the conservative safety-preserving policy without committing to exploratory behavior.
Planning safe trajectories under model uncertainty is challenging because robust planning must guard against worst-case parameter realizations, often producing conservative behavior. Dual control offers a way to improve performance by actively reducing uncertainty during the mission, but exploration should happen only when it is beneficial, safe, and not too costly. This paper proposes Dual-gatekeeper, a budget-constrained safe dual control framework that evaluates informative candidate trajectories before execution. A candidate is committed only if it preserves safety, respects a mission-level exploration budget, and is predicted to shrink the parameter uncertainty set.
Committed trajectories must satisfy state and input constraints under admissible uncertainty and bounded disturbances.
Exploration is allowed only when its predicted excess mission cost remains inside a prescribed budget.
Feasible candidates are scored by predicted reduction in the current parameter uncertainty set.
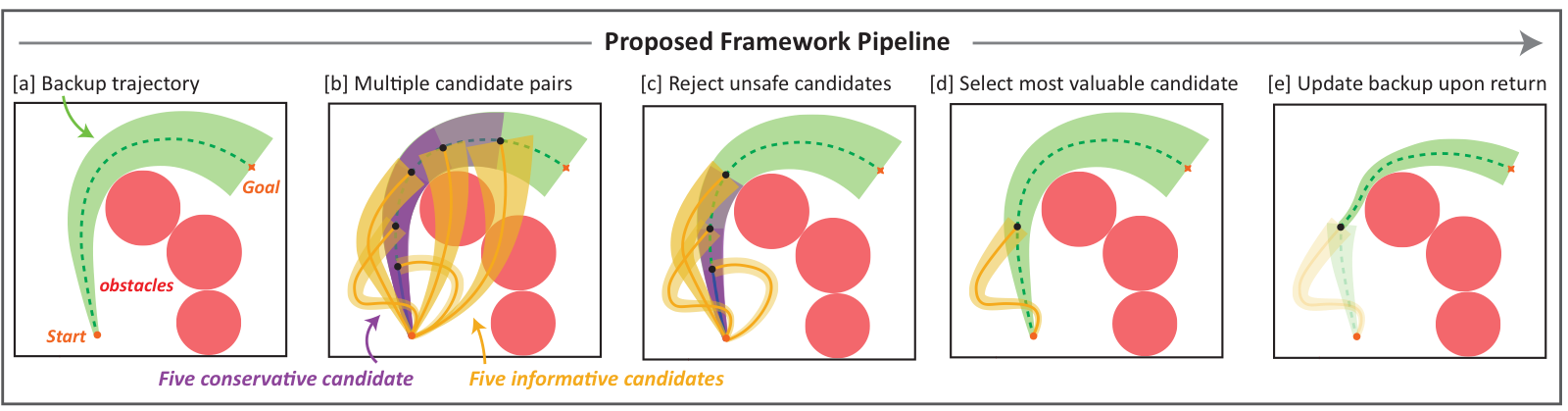
At every replanning step, the robust trajectory planner supplies a conservative backup trajectory. Dual-gatekeeper then generates both robust mission candidates and informative candidates, rejects unsafe or budget-infeasible options, predicts uncertainty reduction for the remaining candidates, and commits the highest-scoring feasible trajectory to the low-level controller.
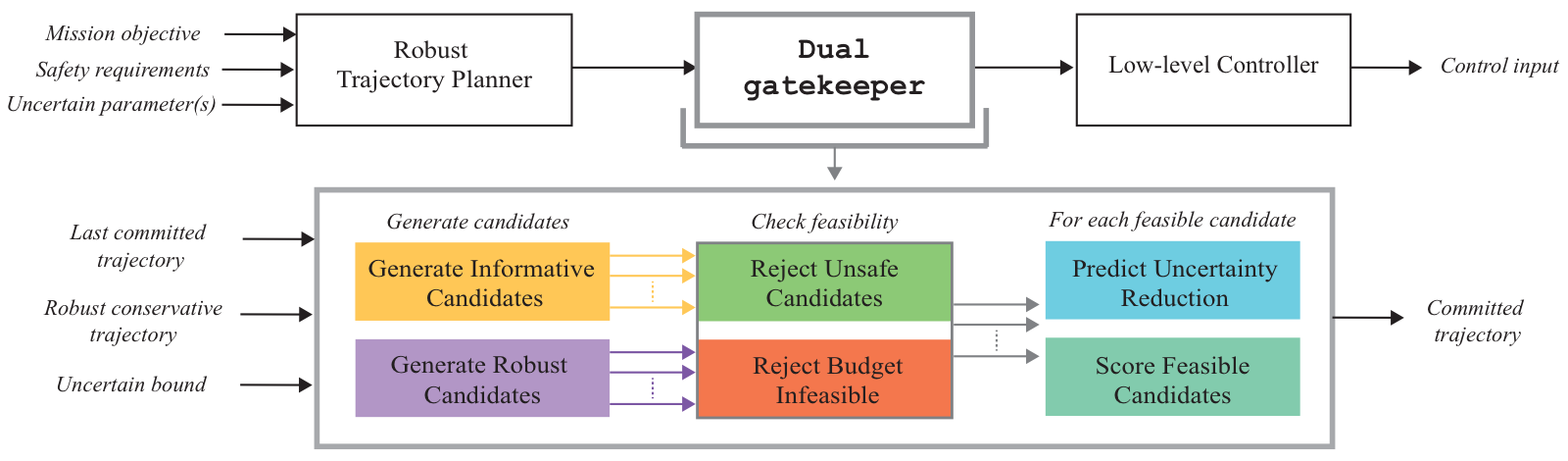
The framework uses set-membership identification to maintain a feasible parameter set that contains the true model parameter. Informative candidates are evaluated by how much they are expected to shrink this set, measured through directional widths of the uncertainty region.
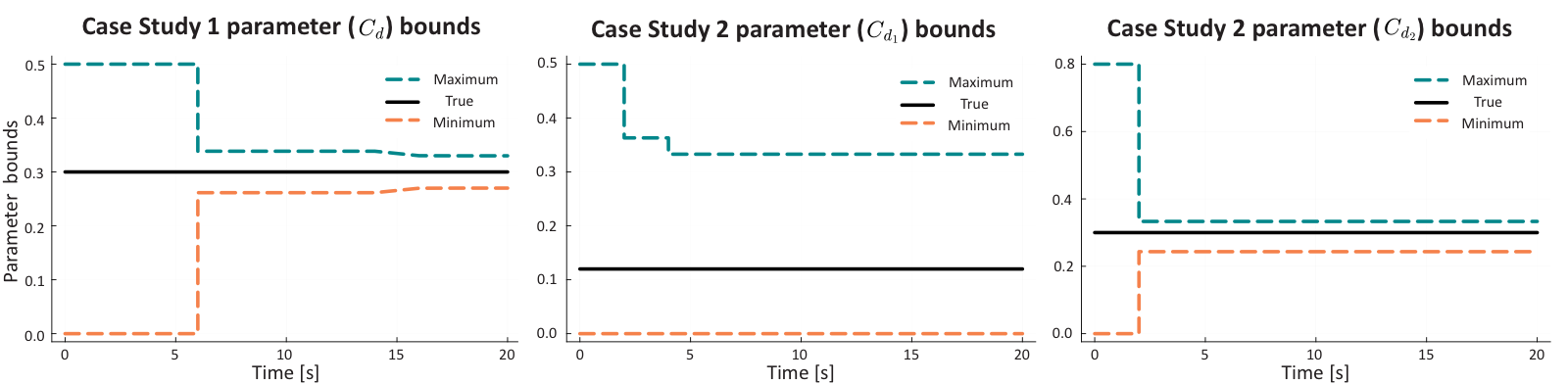
The racing simulations compare conservative execution with Dual-gatekeeper variants. Together, they show how the framework uses safety filtering and active uncertainty reduction to decide which trajectory should be committed.
The car follows the conservative safety-preserving policy without committing to exploratory behavior.
When the uncertainty set stays large, many candidate trajectories cannot be certified as safe, so the gatekeeper does not commit them and falls back to conservative behavior.
As uncertainty is reduced, more candidate trajectories pass the safety and budget checks and can be committed; candidates that still fail certification are rejected.
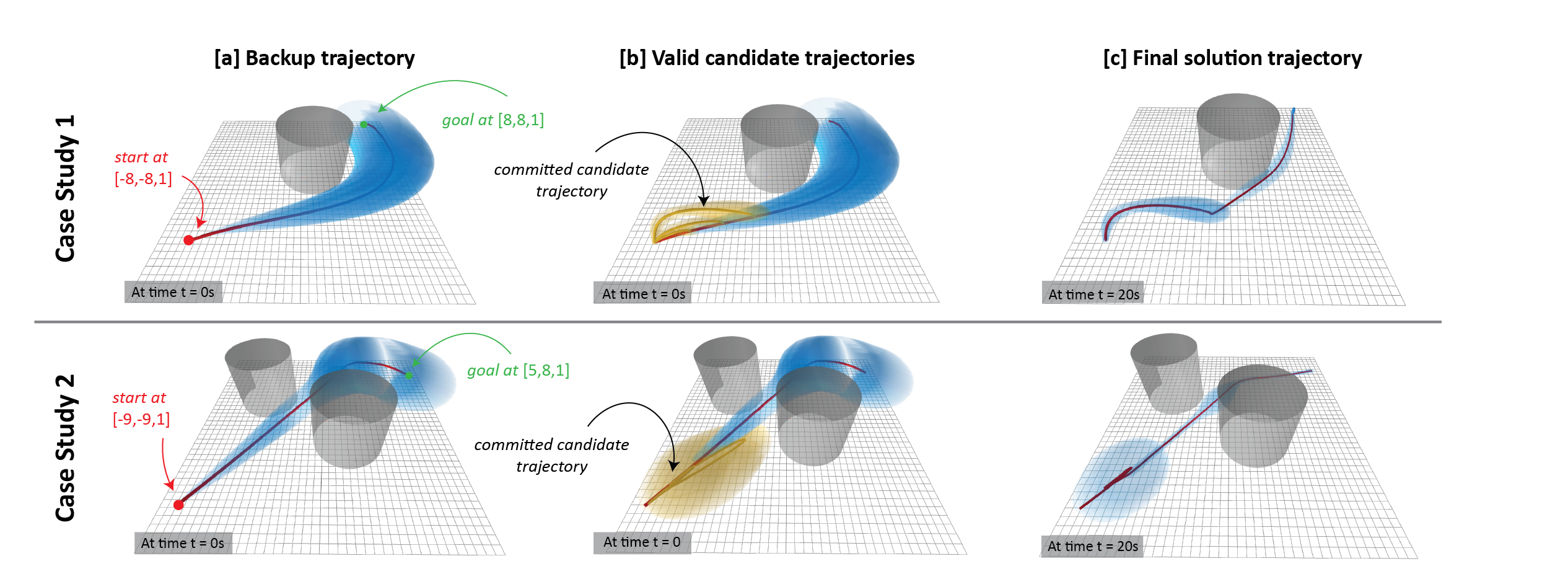
The same architecture is demonstrated on quadrotor navigation. The planner compares backup trajectories, valid candidate trajectories, and final committed solutions while respecting obstacle constraints.
Dual-gatekeeper does not rely on a loosely tuned exploration reward. It treats exploration as a verifiable decision: certify safety, check the exploration budget, predict uncertainty reduction, and then commit only the best feasible candidate.