Research
Some problems I have been working on:
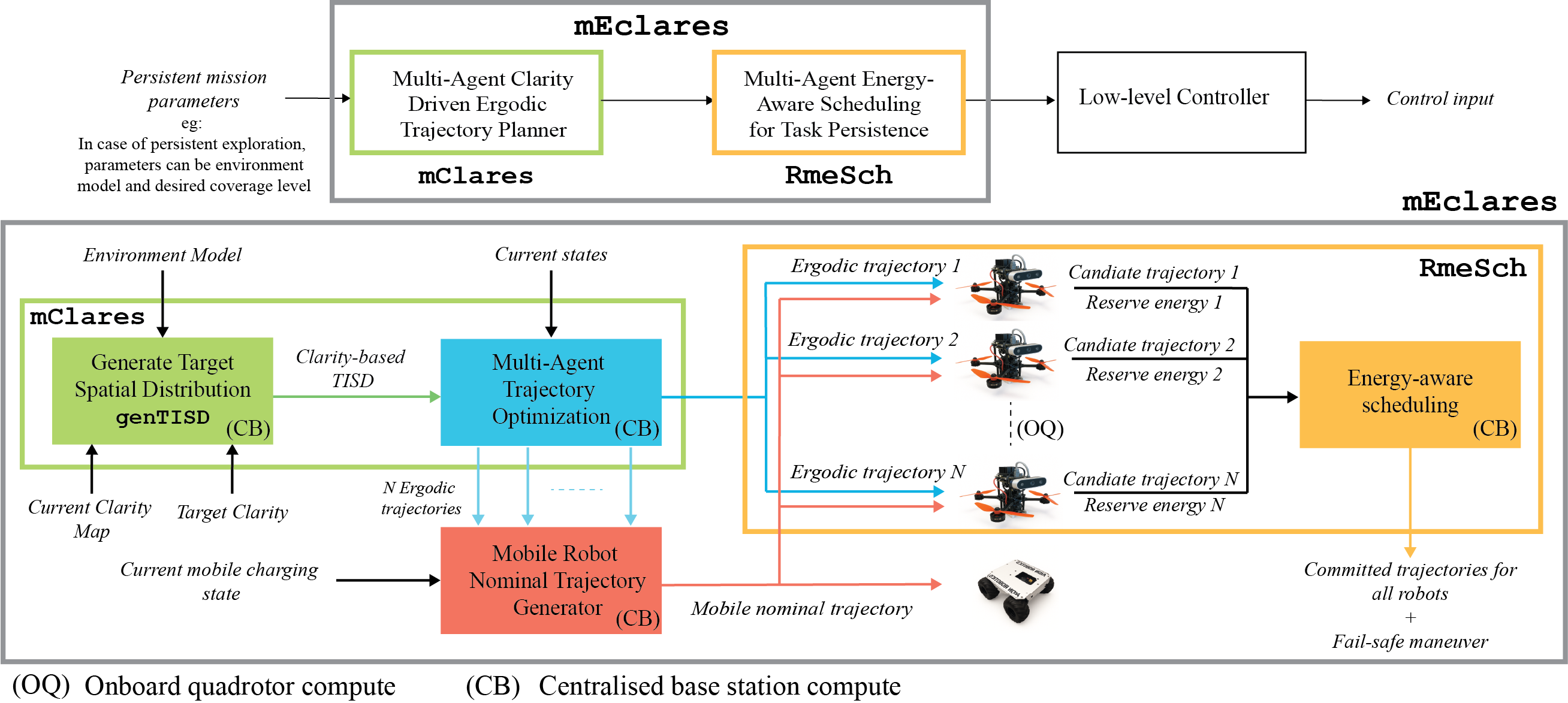
Long-horizon energy-constrained planning
Informative Planning in Spatiotemporal Environments
- How can a robot plan trajectories that explicitly account for how information evolves and decays across space and time during exploration?
- How can this framework be extended to the multi-agent case, where robots must coordinate sensing and avoid redundant observations of the same regions?
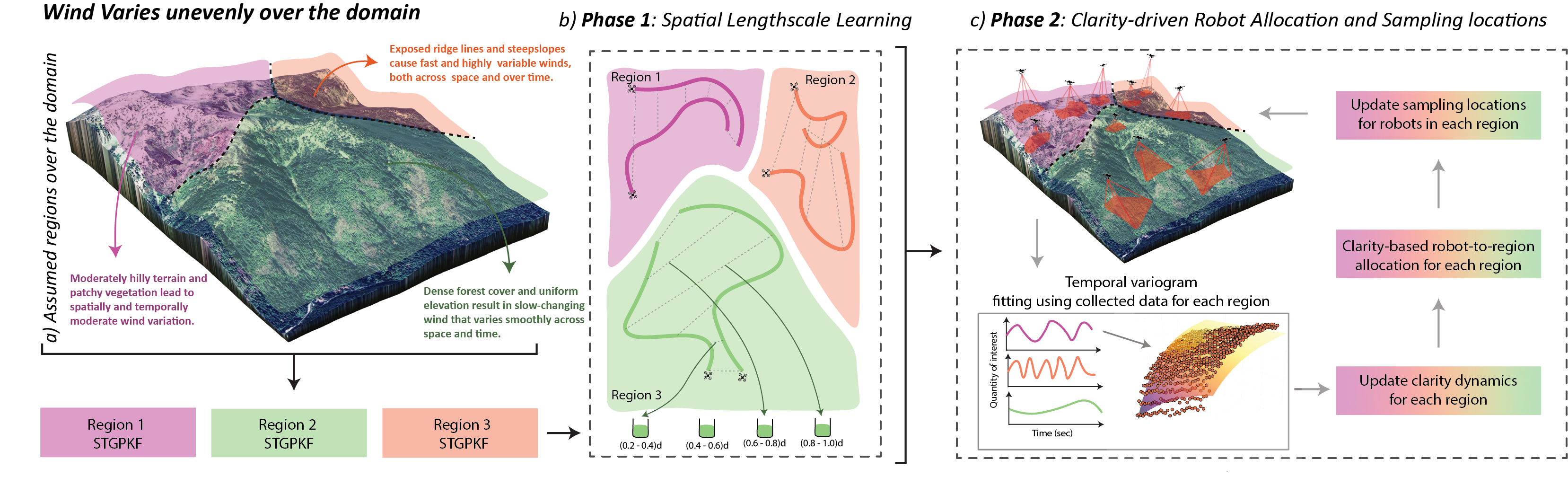
- How can a team of robots be allocated across regions with differing spatial and temporal correlations to effectively capture the varying degrees of variability across the regions?
- How can a robot plan trajectories that explicitly couple its motion with the spatiotemporal evolution of information, accounting for spatially varying decay rates, while maintaining provable safety guarantees?
Planning under Uncertainty
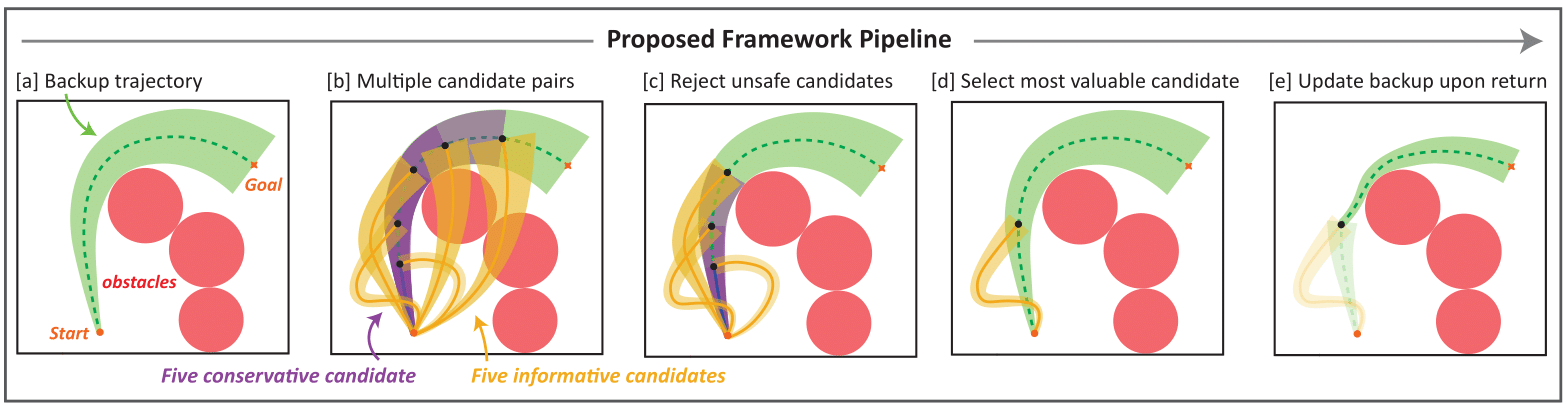
- How can we design trajectories that reduce uncertainty safely, and only when it improves performance and lowers cost?
- How can we design trajectories that reduce uncertainty safely while staying within a fixed mission cost budget?