
Informative and Fast Exploration Planning Using UAV for Reconnaissance Operations
Published:
- Proposed and developed Prioritized-FUEL (Fast UAV ExpLoration), a hierarchical approach for faster coverage, exploration and informative planning for reconnaissance and search & rescue operations
- Proposed method showed 2 times faster Data Acquisition with same exploration time compared to existent approach
- Helped in Development of simulation environment using ROS, AirSim, Unreal Engine and Gazebo.
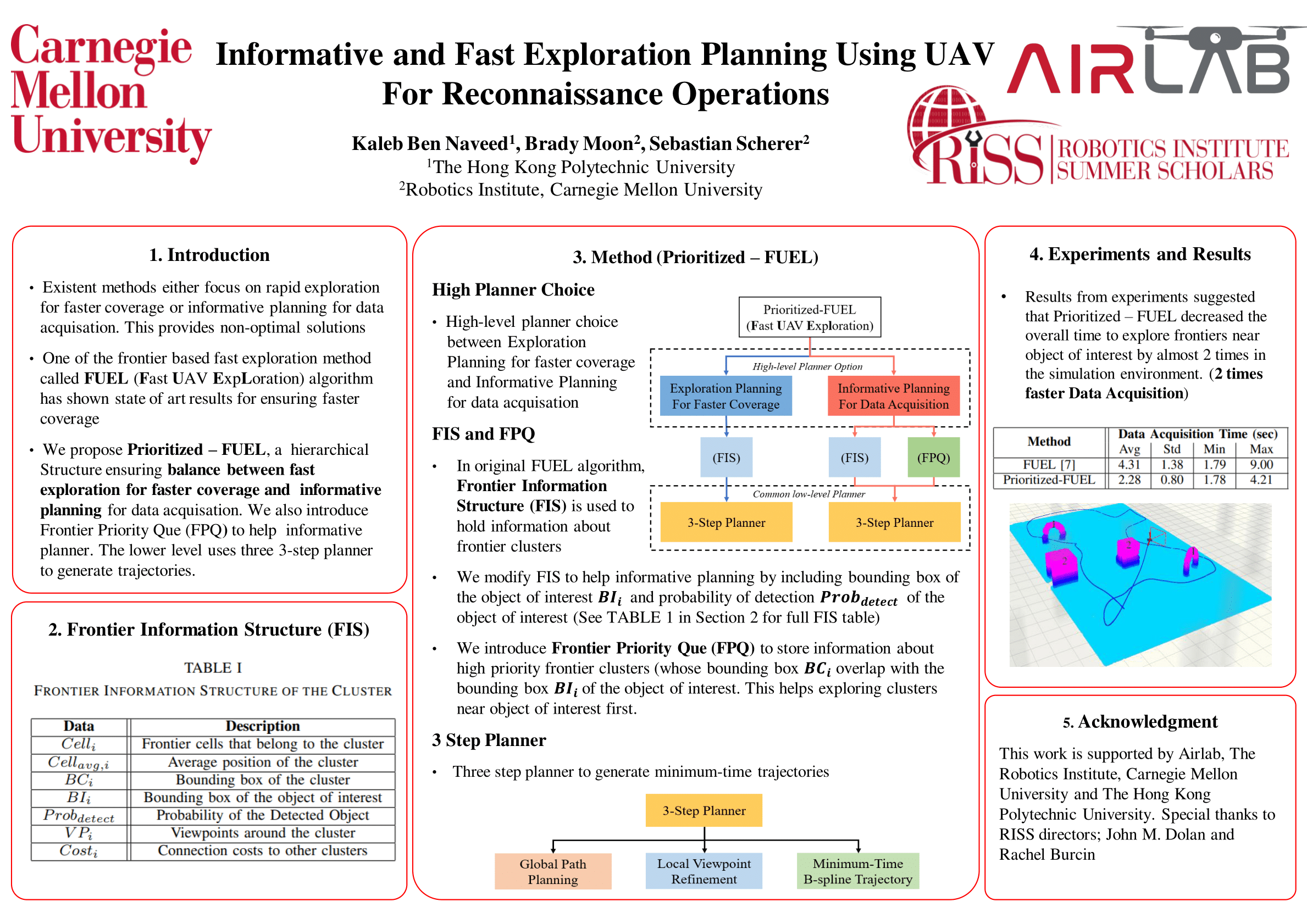
Abstract: In the missions related to search and rescue operations, reconnaissance Unmanned Aerial Vehicles (UAV) are used to effectively search the given environment map and return information about the detected objects with limited flight time. This involves solving the NP-hard problem of maintaining balance between the tasks of fast exploration and data acquisition. Most of the existing work focuses on optimizing only one of these factors. In this paper, we propose Prioritized-FUEL, which is built on top of the FUEL (Fast UAV Exploration) algorithm, a frontier-based exploration technique. The proposed hierarchical structure maintains balance between fast coverage and data acquisition through the introduction of two high-level planner options: Exploration planning and Informative planning. In order to facilitate decision making for informative planner, we modify Frontier Information Structure (FIS) in the original FUEL paper to incorporate information about objects of interest. Moreover, we introduce Frontier Priority Que (FPQ) to store information about all the frontiers, which have a higher probability of the presence of the objects of interest near them. The results from the experiments in the light UAV simulation environment show that the proposed method resulted in almost 2 times faster data acquisition as compared to the original FUEL algorithm.