
Trajectory Planning for Autonomous Vehicles Using Hierarchical Reinforcement Learning
Published:
- Proposed and developed Robust-HRL, a Hierarchical Reinforcement Learning (HRL) based framework for decision making trajectory planning for Autonomous Vehicles.
- Robust -HRL showed at least 7 % higher success rate than the existent state of the art RL and heuristic based approaches.
- Helped in Development of simulation environment using ROS, AirSim, Unreal Engine and Gazebo.
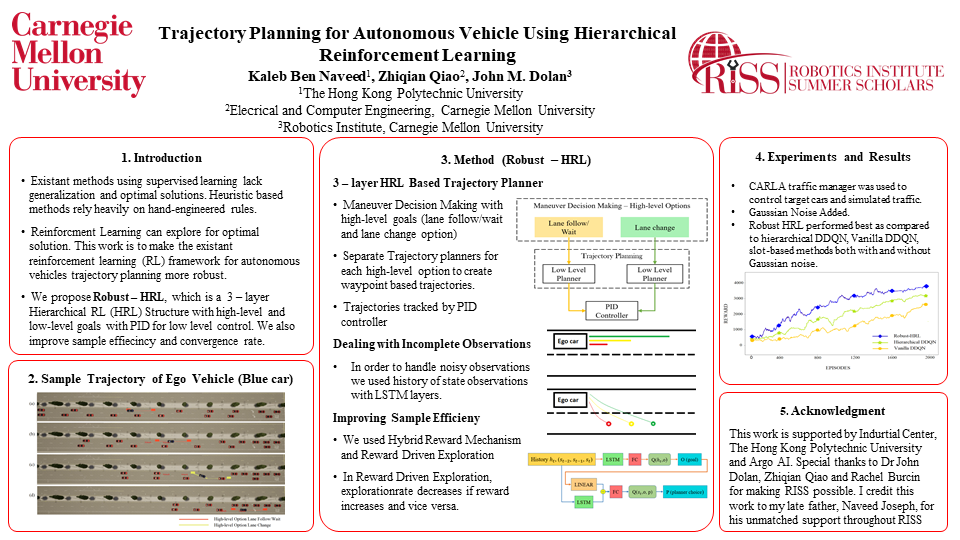
Abstract: Planning safe trajectories under uncertain and dynamic conditions makes the autonomous driving problem significantly complex. Current heuristic-based algorithms such as the slot-based method rely heavily on hand-engineered parameters and are restricted to specific scenarios. Supervised learning methods such as Imitation Learning lack generalization and safety guarantees. To address these problems and to ensure a robust framework, we propose a Robust-Hierarchical Reinforcement Learning (HRL) framework for learning autonomous driving policies. We adapt a state-of-the-art algorithm, Hierarchical Double Deep Q-learning (h-DDQN), and make the framework robust by (1) constituting the decision of selecting driving maneuver as a high-level option; (2) for the lower-level controller, outputting waypoint trajectories to track with a Proportional-Integral-Derivative (PID) controller instead of direct acceleration/steering actions; and (3) using a Long-Short-Term-Memory (LSTM) layer in the network to alleviate the effects of observation noise and dynamic driving behaviors. Moreover, to improve the sample efficiency, we use Hybrid Reward Mechanism and Reward-Driven Exploration. Results from the high-fidelity CARLA simulator while simulating different interactive lane change scenarios indicate that the proposed framework reduces convergence time, generates smoother trajectories, and can better handle dynamic surroundings and noisy observations as compared to other traditional RL approaches.